

上一章传送门:
锦恢:最优化方法复习笔记(三)牛顿法及其收敛性分析下个星期课变得好少,我最爱的咸鱼生活开始喽~~~
接上上次的牛顿法,这次开始的两篇文章写写拟牛顿法。
目录:
- 拟牛顿法
- 拟牛顿法框架
- 拟牛顿法是在
下的最速下降法
- 几种经典的拟牛顿算法
- SR1
- DFP
- BFGS
- SR1,DFP,BFGS之间的关系
- Broyden族
- 代码实现三种拟牛顿算法
回顾一下牛顿法的表达式:
上一节说过了牛顿法的缺陷主要在于?
的求取和存储很消耗资源,对于较高维度的数据使用牛顿法求解比较困难。既然
?的求取和存储很困难,那么我们是否可以近似求得
?呢?
拟牛顿法(Quasi-Newton methods)的思路就是通过在牛顿法的迭代中加入近似求取每一步Hessian矩阵的迭代步,仅通过迭代点处的梯度信息来求取Hessian矩阵的近似值。现在我们把Hessian矩阵在第 步?的迭代的近似值记作
?。很显然,我们希望
?,在原本的牛顿法中,我们有:
那么通过
使用?代替?
,我们的迭代式就变成了:
当然,既然是近似,我们当然不能保证?
能够比较好地近似?
步迭代的Hessian矩阵,所以我们需要通过某种映射来对?
多迭代得到
?来使得
?能够比较好地近似第
?步的Hessian矩阵。除此之外,你会发现,牛顿法需要的Hessian矩阵实际上只是需要使用它的逆矩阵,既然计算Hessian矩阵很烦,计算逆矩阵也很烦,那我们何不直接近似Hessian矩阵的逆矩阵呢?我们记?
,再结合迭代近似值的想法,我们有如下的式子:
fine,其实我们已经得到拟牛顿法了。不同于之前的优化方法,拟牛顿法是一个思想而不是具体的方法,只要迭代形式满足上述迭代式,并且能够收敛,那么这样的方法都是拟牛顿法。那么接下来介绍的每一个具体的拟牛顿法都是在确定
?怎么确定,怎么更新。
有了之前的认识,我们可以大致写出拟牛顿法的算法过程。
当然,你也可以在更新迭代点时增加步长因子,使其变成阻尼拟牛顿法:
如何根据?处的信息更新
?会在后面讲到,它确定了具体的拟牛顿法。
在具体展开有哪些可以使用的拟牛顿法之前,我觉得我们可以对牛顿法和拟牛顿法来做个比较,来获取一些拟牛顿法本身的性质亦或是难能可贵的认识,这会是在实际工程应用中难以获取的。
我们完全可以从另一个角度来看这个问题,类似于牛顿法的推导过程,我们现在处在迭代点? 处,我们希望在下一步迭代?
后,?
能尽可能地比?
小。为了更好地观察?
和?
之间到底差多少,我们可以使用Taylor展开式:
舍去?的高阶项,我们有:
为了使得?,此处默认?

也就是说,在误差允许的情况下(?不要太大,Taylor展开式的领域近似,懂的都懂,不懂的我也没有办法=_=), ?比?
小
?。因为我们希望?
尽可能比
?小,自然而然我们希望他们两之间的差值
?尽可能大。注意到此处的
?是固定的,也就是我们此时考察的函数在迭代点
?处的梯度
?是固定的,所以我们希望动一动
?,来让
?尽可能变大。因此,我们的问题变成了如下的优化问题
但是,你会发现,当?
与
?的夹角固定时,只要我们把?
拉得足够大,那么
?就会变得无限大,这样的结果是没有意义的。因此我们需要对
?做一个约束,为了和之前的拟牛顿法的?
联系起来,我们使用椭球范数
?来约束
?的取值,我们将?约束为一个定值(?
定义为
?),不妨就把这个定值设为1吧。那么我们要优化的问题就是如下的式子:
由Cauchy-Schwartz不等式,可得:
当且仅当
?时,上述不等式等号成立。
故,在我们将 ?在
?意义下的椭球范数设为定值时,可以得到下降幅度最大的方向为?
。因此我们可以说拟牛顿法是在?
下的最速下降法。
由于每次迭代时的?都会变化,那么度量
?的范数也会随之变化,因此,我们会将这样的方法称为变尺度法
那么当 ?时,拟牛顿方向变为梯度下降方向,所以我们也可以说梯度下降法是在?
(
范数)下的最速下降法;而普通的牛顿法则是在?
下的最速下降法。
还记得在拟牛顿法框架中讲到的模糊不清的最后一步——“根据? 处的信息更新
?”吗?下面所述便是这个步骤的具体展开。
下面介绍三种具体的拟牛顿法,而推导它们的关键则是确定如何迭代得到每步迭代点Hessian矩阵逆矩阵的倒数? 的近似值
?。也就是如何确定?
的迭代更新式。
首先做几个符号的规定,来为我们后续的推导做符号运算上的简化。记? 。
很明显,我们就有:
SR1的全称为Symmetric Rank-One,是William C. Davidon在1956年提出的,但由于缺少收敛性分析,所以Davidon的论文被拒稿,导致SR1算法没能成为第一个公认的拟牛顿法。
SR1确定?迭代式的逻辑比较简单——根据? 处的信息得到一个修正量?
来直接加上?
来更新?
,也就是如下的式子:
由于我们希望?
,所以我们有:
由于?
和
?都是对称矩阵,所以
?也应该是一个对称矩阵。
而SR1算法就直接把这个对称矩阵? 设为
?,那么迭代式为:
其中?
。
很显然? 是对称矩阵。至少这个设置上是合理的,那么接下来就根据整个拟牛顿法中的其他条件来把?
和
?给表示或是整合成其他的表达。
我们在①的两边乘上? ,再根据
?,我们有:
其中 ?是实数,所以我们有:
为了后续的运算方便,我们把
?记作?
,也就是:
②式还可以写成?
,我们将③式带入其中可得:
注意到?
和
?都是实数,所以上式也能写成:
很显然
?才能使上式成立,因此:
将③和⑤代入①中可得:
因此我们得到了SR1更新?的迭代式:
结合之前的拟牛顿法框架,我们可以整合出SR1算法的具体步骤:
SR1虽然能近似 ?,但是我们无法证明SR1更新得到?的
一定是正定的。也就是说,SR1拟牛顿法确定的拟牛顿方向不一定是下降方向=_=。
DFP是其发现者Davidon, Fletcher, Powell的开头大写字母拼成的,也是第一个公认的拟牛顿法。
其基本思路和SR1差不多,也是想着确定一个对称矩阵修正量? 来更新?
,只不过SR1是令?
,而DFP是给与了
?更大的自由度。DFP中,我们令
?,那么?
的迭代更新式为:
其中的
?和?
都是待定的系数。
那么接下来和推导SR1一样咯,我们在①式的两边右乘上? 可得:
由于我们给与了
?更多的自由度,因此,仅凭上述的信息,我们当然是无法确定?
的值的。也就说满足上式的?的
取值其实是不唯一的。在DFP中,我们取
。别问为什么,问就是推导方便、结果简单、结果收敛性好说明。
接下来便是确定 ?和
?的过程了。很显然,这两个量的取值也不唯一。对于②式,我们可以改写为:
为了好算且方便,我们干脆直接令
?。
对于 ?,由于我们之前取了?
,所以
为了使得上式恒成立,我们有
?,因此,我们有?
。
同理我们也可以得到 ?,因此,我们有
?。
将 ?的取值代入①式中,我们就可以得到DFP更新?
的迭代式了:
DFP的推导过程看似随意,但是DFP的迭代公式也可以通过如下的优化问题的解得到:
其中
且
满足拟牛顿方程。此处不做推导,无聊的同学请自行推导。
结合之前的拟牛顿法框架,我们可以整合出DFP算法的具体步骤(水行数警告):
BFGS这个算法的记忆没有诀窍=_=,因为它是下面这四个人分别提出的,所以和DFP一样,用四个人的名字的开头字母命名。
其推导其实和DFP一样,不过BFGS是从 ?出发来推导的。(还记得
?是啥吗??
是我们对
?的近似)
对于? ,我们采用和DFP一样的思路,也就是考虑
?的rank-tow修正:
后面和DFP一模一样,我们可以得到
?的迭代公式:
你会发现,我们其实就是把DFP中的?
与
?互换位置,把
?换成
?罢了。
那么我们要求的? 不就是
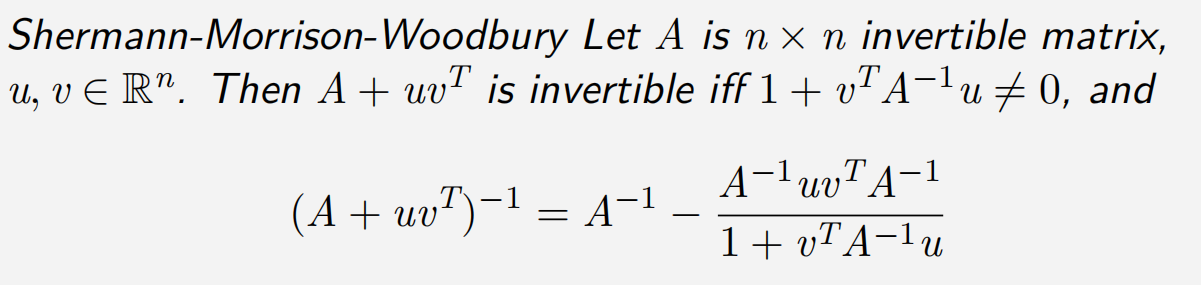
?吗?那么我们直接对①式两边取逆就行了。你会发现右式的取逆你算不出来,这时你就需要SMW公式了:
我们可以递归地使用上面的式子,令 ?代入SMW公式中。其中?
的计算再用一次SMW公式,反正通过一通暴算,最终我们得到:
如此,我们便得到了BFGS
的?迭代更新式:
于是,我们得到了BFGS拟牛顿法的具体步骤(我真不是在水行数~~~):
有了之前的SMW公式,我们可以尝试求取上述的三个拟牛顿法的? 的更新公式,毕竟
?才是对Hessian矩阵的近似,我们需要知道每步对Hessian矩阵的近似情况,这个对收敛性分析会有比较大的帮助。
SR1的迭代式为
两边取逆,使用SMW公式,可以得到SR1中,?
的迭代式
可以发现,结果就是将?
和
?交换,把?
和
?交换。
因此,我们说SR1是自对偶的。
再看看DFP和BFGS迭代公式两边取逆后的结果:
可以看到DFP和BFGS公式高度对称,只需? 就可以在DFP和BFGS公式之间相互转换。
因此,我们说DFP和BFGS互为对偶。
既然DFP和BFGS是互为对偶的,那用哪一个比较好呢?你当然可以通过若干组实验来测试哪个的性能的更优,或者对其收敛一通验证。但是一个比较的朴素的做法就是“我都要”,也就是取DFP迭代式和BFGS迭代式的正加权组合:
其中
。?我们记?
,然后将
?和
?的表达式代入其中可得:
随着 ?遍历?
内的值,我们可以得到一系列的
?。我们将这一系列的?
的集合称为Broyden族。
而且根据定义, ?时,?
即为BFGS校正;?
时,?
即为DFP校正。而且可以证明,DFP和BFGS校正都是保持正定的,且我们的?
,所以我们只要满足
?就可以保证Broyden族校正都是保持正定的。
终于到了我最爱的编程环节了,这次我们就不像上次的梯度下降法一样造轮子了,我们直接调取写好的优化库来快速完成项目需求。
因为笔者是个Python小白,所以关于数值优化的Python第三方库我知道如下三个:cvxpy,cvxopt,scipy。其中scipy.optimize子库有关于优化的算子。
由于上述的三个库都是基于numpy库开发的,所以在调用pip指令安装时,请先安装numpy库
我翻了一上午的源代码和document,并没有在cvxpy和cvxopt中找到关于拟牛顿法的算子。因此,笔者下面采用scipy.optimize来实现三种拟牛顿法。如果你没有安装相关的依赖库,请打开命令行,输入以下命令来自动安装(请确保你的Python解释器的Script文件夹的路径已被添加到环境变量Path中):
pip install numpy, matplotlib, scipy -i https://pypi.tuna.tsinghua.edu.cn/simple此处我们分别使用SR1,DFP和BFGS拟牛顿法优化如下的函数:
其中 ?,
,
?代表向量
?的第?
个维度上的元素。
已知上述的优化问题的最优点为 ?,取迭代初值为
?。
我们首先先实现上述的函数,我通过一个函数获取一个映射? :
下面所有的代码都写在一个文件中
# -*- utf-8 -*-
# date: 2020-10-22
# author: 锦恢
?
from scipy.optimize import fmin_powell, fmin_bfgs, fmin_cg, minimize, SR1
import numpy as np
import matplotlib.pyplot as plt
?
def r(i, x):
if i % 2 == 1:
return 10 * (x[i] - x[i - 1] ** 2) # 因为ndarray数组的index是从0开始的, i多减一个
else:
return 1 - x[i - 2]
?
def f(m):
def result(x):
return sum([r(i, x) ** 2 for i in range(1, m + 1)])
return result通过 ?我们就可以获取上述需要优化的函数的映射。
为了观察拟牛顿法运行过程中迭代点的下降情况,我们需要计算
# 获取retall的每个点的值损失|f(x) - f(x^*)|
def getLosses(retall, target_point, func):
"""
:param retall: 存储迭代过程中每个迭代点的列表,列表的每个元素时一个ndarray对象
:param target_point: 最优点,是ndarray对象
:param func: 优化函数的映射f
:return: 返回一个列表,代表retall中每个点到最优点的欧氏距离
"""
losses = []
for point in retall:
losses.append(np.abs(func(target_point) - func(point)))
return lossesscipy.optimize子库中的许多执行拟牛顿法的算子提供了call_back参数,该参数要求传入一个函数对象,在拟牛顿每步迭代完后,传入的call_back函数会被调用。由于使用SR1法的算子minimize无法返回迭代过程中的每一个迭代点(也就是retall),于是我们需要call_back函数来将迭代完的点传入外部的列表,从而获取SR1的retall。除此之外,我们可以使用call_back函数来指定迭代停止的条件。
我们编写一个返回函数对象的函数,它会根据我们传入参数的不同返回不同的call_back函数:
sr1_losses = [] # 存储SR1的retall的列表
func = f(4) # 获取需要优化的函数
?
# 通过callback方法来添加迭代的停止条件
def getCallback(func, target_point, ftol, retall):
"""
:param func: 优化目标的函数
:param target_point: 目标收敛点
:param ftol: 收敛条件:|f(x) - f(x^*)| < ftol时,迭代停止
:param retall: 是否存储迭代信息
:param extern_retall: 如果retall为True, 填入一个列表,迭代信息会存在这个列表中
:return: call_back函数对象
"""
def result(xk, state=None):
if retall:
global func, sr1_losses
loss = np.abs(func(target_point) - func(xk))
if loss < ftol:
return True
else:
if retall:
sr1_losses.append(loss)
return False
return result为了方便可视化,我们将数据可视化的逻辑封装到一个函数中:
# 绘制下降曲线
def plotDownCurve(dpi, losses, labels, xlabel=None, ylabel=None, title=None, grid=True):
plt.figure(dpi=dpi)
for loss, label in zip(losses, labels):
plt.plot(loss, label=label)
plt.xlabel(xlabel, fontsize=12)
plt.ylabel(ylabel, fontsize=12)
plt.title(title, fontsize=18)
plt.yscale("log")
plt.grid(grid)
plt.legend()接着我们定义一下迭代初值、最优点和终止条件的阈值 ?(?
时,迭代停止)并获取三个拟牛顿法需要的
call_back函数。
x_0 = np.array([1.2,1.0,1.0,1.0]) # 迭代初值
target_point = np.array([1,1,1,1], dtype="float32") # 最优点
FTOL = 1e-8 # 终止阈值
?
sr1_callback = getCallback(func, target_point, ftol=FTOL, retall=True)
dfp_callback = getCallback(func, target_point, ftol=FTOL, retall=False)
bfgs_callback = getCallback(func, target_point, ftol=FTOL, retall=False)下面我们我们使用minimum,fmin_powell,fmin_bfgs来实现三种拟牛顿法的迭代,并把DFP和BFGS的retall存入列表中。
minimum = minimize(fun=f(4), x0=x_0, # 通过minimize函数执行SR1,根据内嵌的callback填充loss,并返回OptimizerResult对象
method="trust-constr",
hess=SR1(),
callback=sr1_callback)
?
dfp_minimum, dfp_retall = fmin_powell(func=func, x0=x_0,
retall=True,
disp=False,
callback=dfp_callback)
dfp_losses = getLosses(dfp_retall, target_point, func=func)
?
bfgs_minimum, bfgs_retall = fmin_bfgs(f=func, x0=x_0,
retall=True,
disp=False,
callback=bfgs_callback)
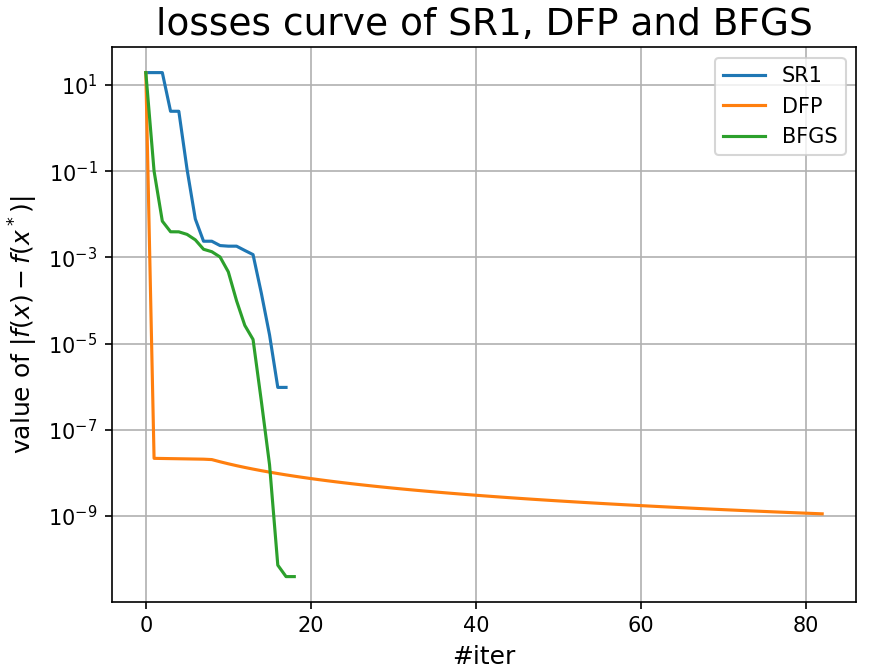
bfgs_losses = getLosses(bfgs_retall, target_point, func=func)迭代做完后,我们自然想知道结果如何,可视化是一个直观的方法,我们将plt画布的分辨率调为150,设置一下各个轴的名称,将它可视化出来:
plotDownCurve(dpi=150,
losses=[sr1_losses, dfp_losses, bfgs_losses],
labels=["SR1", "DFP", "BFGS"],
xlabel="#iter",
ylabel="value of $|f(x) - f(x^*)|$",
title="losses curve of SR1, DFP and BFGS")
plt.show() out:
我们可以查看三种方法得到的最优点和它们具体的迭代次数:
print(f"SR1\ 最终迭代点:{minimum.x.tolist()}, 共经历{minimum.cg_niter}次迭代")
print(f"DFP\ 最终迭代点:{dfp_minimum}, 共经历{len(dfp_losses)}次迭代")
print(f"BFGS\ 最终迭代点:{bfgs_minimum}, 共经历{len(bfgs_losses)}次迭代")out:
SR1 最终迭代点:[0.9999962062462336, 0.9999929560009194, 0.9999943517470878, 0.9999915182271095], 共经历35次迭代
DFP 最终迭代点:[0.99998036 0.99996341 1. 1. ], 共经历83次迭代
BFGS 最终迭代点:[0.99999547 0.9999909 0.99999572 0.99999144], 共经历19次迭代可以看到三种方法都成功收敛到了 ?,说明程序是没问题滴~~~
下一章传送门:
锦恢:最优化方法复习笔记(五)拟牛顿法的收敛性分析

